
Содержание
Обзор драйвера L298N
Драйвер L298N используется радиолюбителями для многофункционального управления двигателями постоянного тока. Схема модуля, состоящая из двух H-мостов, позволяет подключать к нему один биполярный шаговый двигатель или одновременно два щёточных двигателя постоянного тока. При этом есть возможность изменять скорость и направление вращения моторов. Управление осуществляется путём подачи соответствующих сигналов на командные входы, выполненные в виде штыревых контактов. На рисунке №1 показан внешний вид модуля с кратким описанием всех его составляющих.
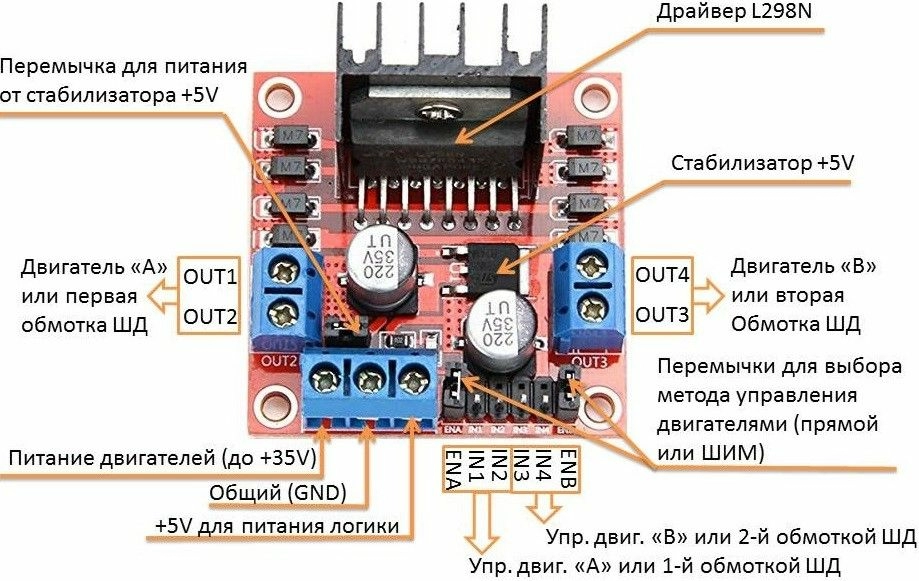
Рисунок №1 – внешний вид модуля L298N
Рисунок №2 – электрическая схема модуля L298N
Рисунок №3 – транзисторные мосты Н-типа
Технические характеристики
Подключение L298N к плате Arduino
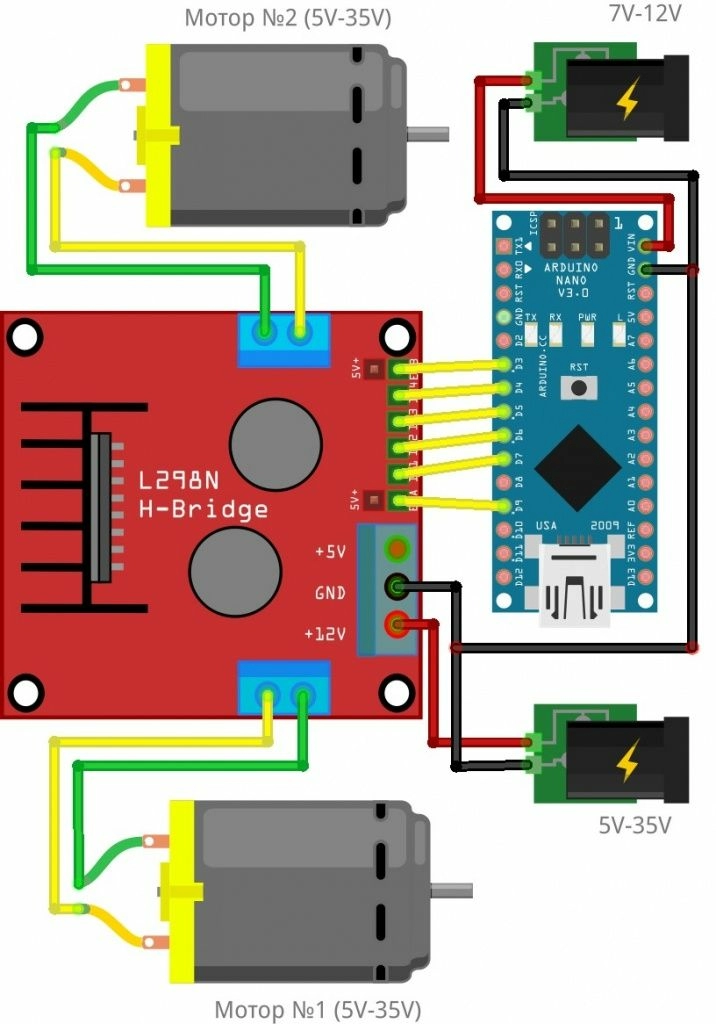
Рисунок №4 – схема подключения двух щёточных двигателей постоянного тока
#define PIN_ENA 9 // Вывод управления скоростью вращения мотора №1 #define PIN_ENB 3 // Вывод управления скоростью вращения мотора №2 #define PIN_IN1 7 // Вывод управления направлением вращения мотора №1 #define PIN_IN2 6 // Вывод управления направлением вращения мотора №1 #define PIN_IN3 5 // Вывод управления направлением вращения мотора №2 #define PIN_IN4 4 // Вывод управления направлением вращения мотора №2 uint8_t power = 105; // Значение ШИМ (или скорости вращения) void setup() { // Установка всех управляющих пинов в режим выхода pinMode(PIN_ENA, OUTPUT); pinMode(PIN_ENB, OUTPUT); pinMode(PIN_IN1, OUTPUT); pinMode(PIN_IN2, OUTPUT); pinMode(PIN_IN3, OUTPUT); pinMode(PIN_IN4, OUTPUT); // Команда остановки двум моторам digitalWrite(PIN_IN1, LOW); digitalWrite(PIN_IN2, LOW); digitalWrite(PIN_IN3, LOW); digitalWrite(PIN_IN4, LOW); } void loop() { // Вращаем моторы в одну сторону с разной скоростью while(power < 255) { analogWrite(PIN_ENA, power); // Устанавливаем скорость 1-го мотора analogWrite(PIN_ENB, power); // Устанавливаем скорость 2-го мотора // Задаём направление для 1-го мотора digitalWrite(PIN_IN1, HIGH); digitalWrite(PIN_IN2, LOW); // Задаём направление для 2-го мотора digitalWrite(PIN_IN3, HIGH); digitalWrite(PIN_IN4, LOW); delay(3000); // Пауза 3 секунды power += 30; // Увеличиваем скорость } power = 225; // Вращаем моторы в другую сторону с разной скоростью while(power > 105) { analogWrite(PIN_ENA, power); // Устанавливаем скорость 1-го мотора analogWrite(PIN_ENB, power); // Устанавливаем скорость 2-го мотора // Задаём направление для 1-го мотора digitalWrite(PIN_IN1, LOW); digitalWrite(PIN_IN2, HIGH); // Задаём направление для 2-го мотора digitalWrite(PIN_IN3, LOW); digitalWrite(PIN_IN4, HIGH); delay(3000); // Пауза 3 секунды power -= 30; // Уменьшаем скорость } power = 105; } В самом верху программы задаются макроопределения всех выводов, используемых в проекте. В функции Setup() все выводы Arduino Nano, участвующие в управлении, задаются в качестве выхода. На выводах IN1-IN4 выставляются логические нули, чтобы двигатели гарантированно не вращались в момент старта программы. В главном цикле, программа обеспечивает вращение двигателей в одном направлении, увеличивая их скорость каждые 3 секунды. Когда разгон вырастает до максимального, моторы начинают вращаться в обратном направлении, постепенно замедляя скорость. На пике сбрасывания скорости, алгоритм повторяется заново. Как видим, сложного здесь ничего нет. Теперь разберёмся с шаговым двигателем. На рисунке №5 показана схема его подключения к плате Arduino Nano.
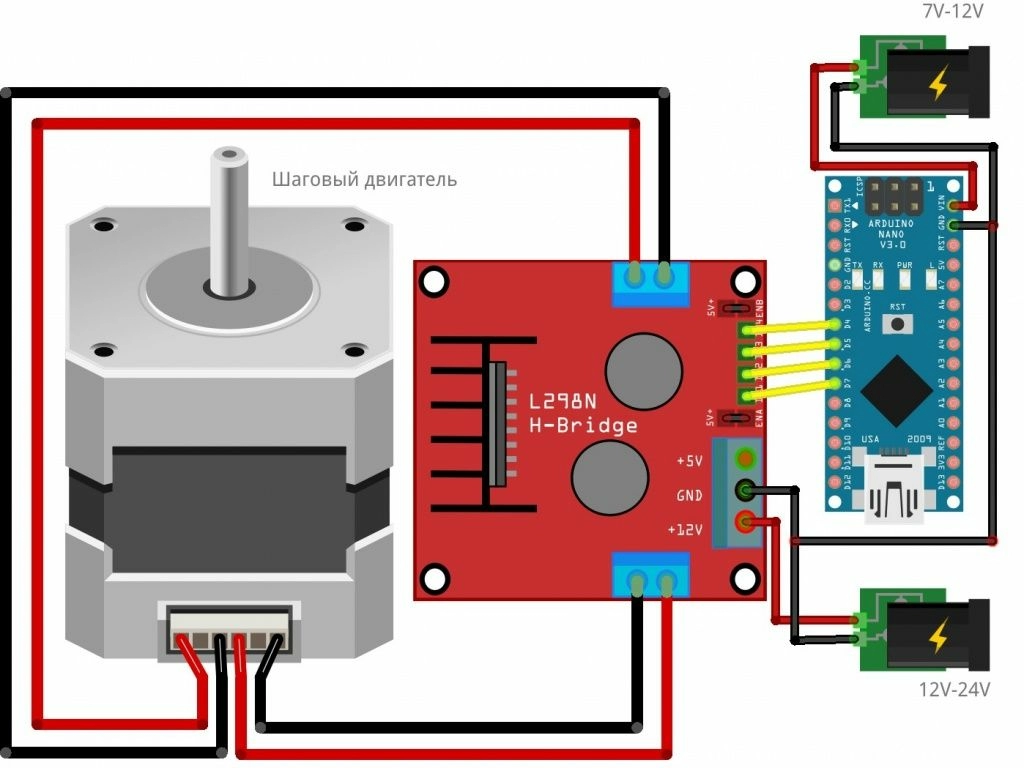
Рисунок №5 - схема подключения шагового двигателя к Arduino Nano
Пример использования
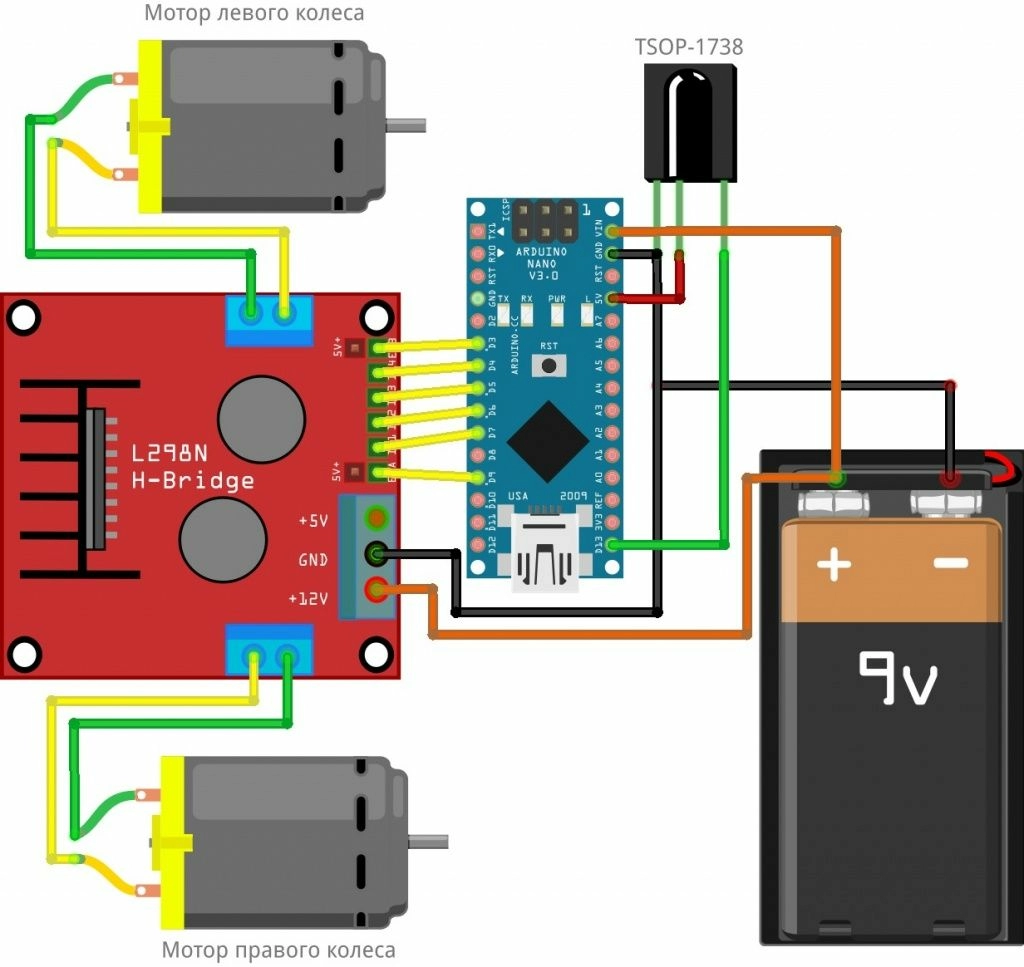
Рисунок №6 - электрическая схема робота-машинки
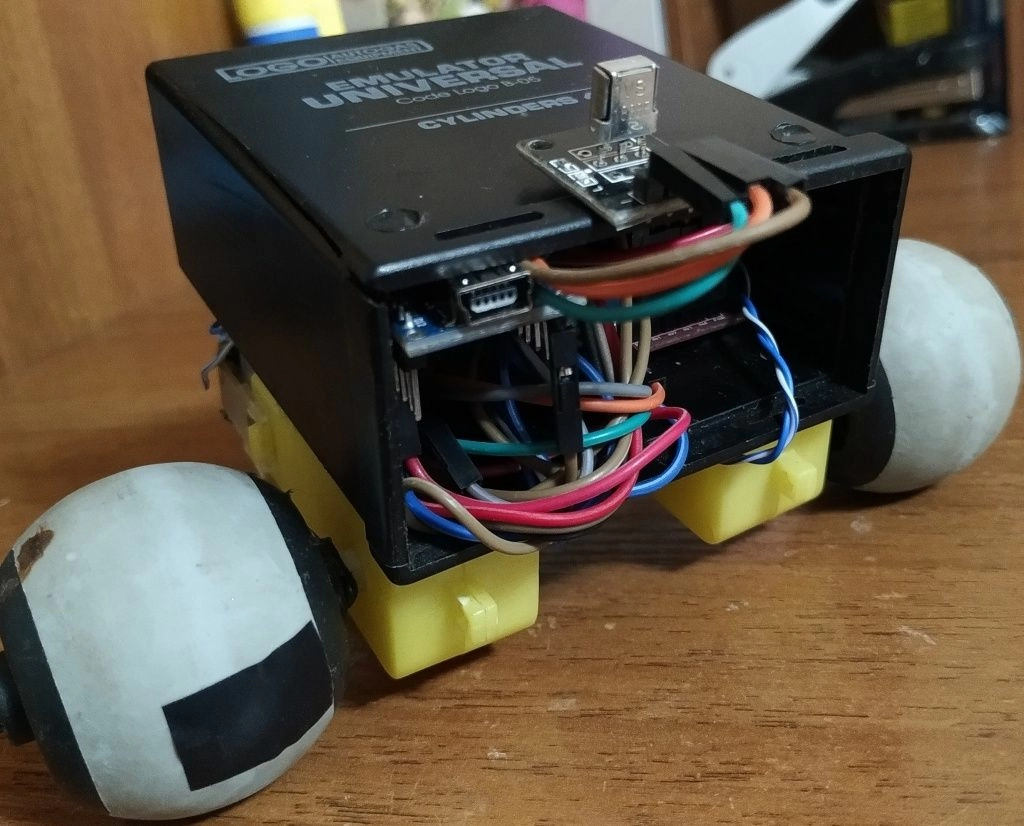
Рисунок №7 - пример реализации шасси для робота
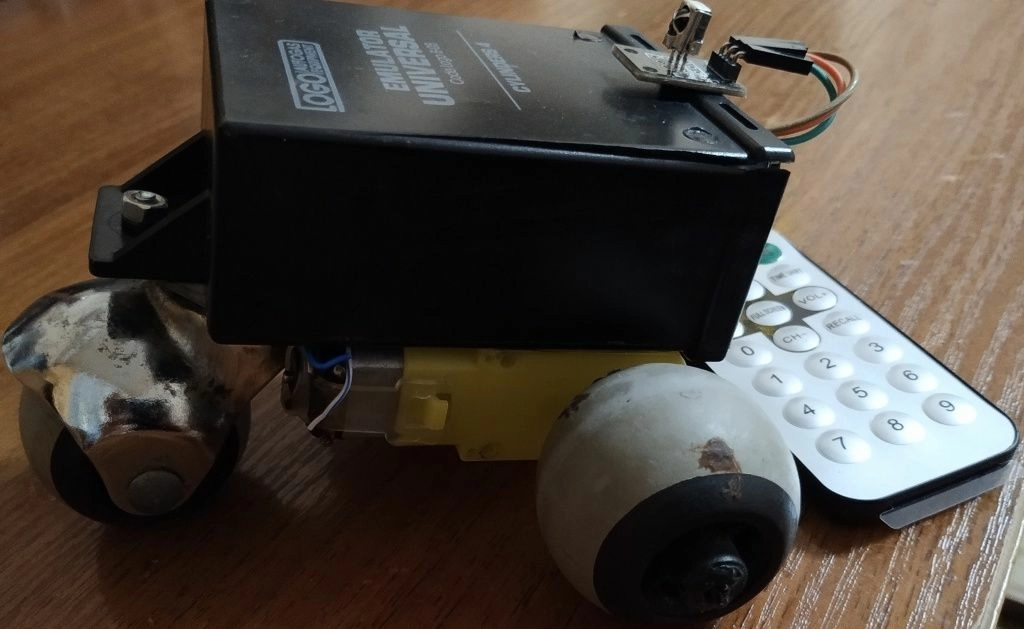
Рисунок №8 - робот готов к программированию

 для печати в невесомости")
 пластик для 3D принтера. Особенности, применение, настройки печати")